







ກົດລະບຽບຊ້າຍ, ກົດລະບຽບຂວາ, ກົດລະບຽບສະກູຂວາ.ກົດລະບຽບຊ້າຍ, ນີ້ແມ່ນພື້ນຖານສໍາລັບການວິເຄາະຜົນບັງຄັບໃຊ້ຂອງການຫມຸນ motor ໄດ້.ເວົ້າງ່າຍໆ, ມັນແມ່ນຕົວນໍາສົ່ງກະແສໄຟຟ້າໃນສະຫນາມແມ່ເຫຼັກ, ເຊິ່ງຈະໄດ້ຮັບຜົນກະທົບຈາກຜົນບັງຄັບໃຊ້.
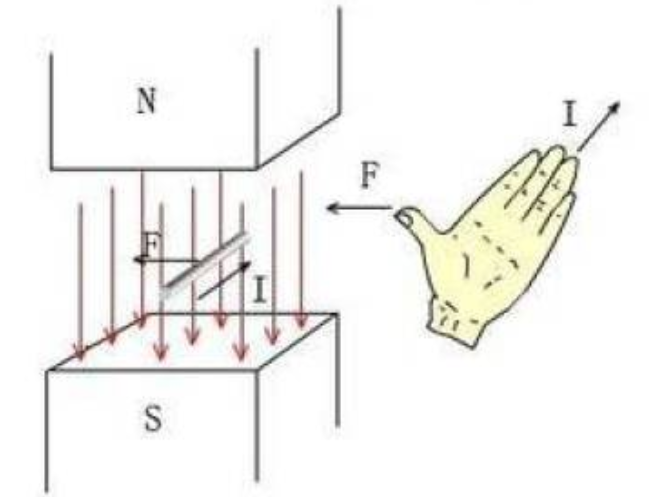
ໃຫ້ເສັ້ນສະຫນາມແມ່ເຫຼັກຜ່ານທາງຫນ້າຂອງຝາມື, ທິດທາງຂອງນິ້ວມືແມ່ນທິດທາງຂອງກະແສ, ແລະທິດທາງຂອງຫົວໂປ້ແມ່ນທິດທາງຂອງແຮງແມ່ເຫຼັກ.traction ຂອງຜົນບັງຄັບໃຊ້ຕັດສາຍສະຫນາມແມ່ເຫຼັກເພື່ອສ້າງຜົນບັງຄັບໃຊ້ໄຟຟ້າ.
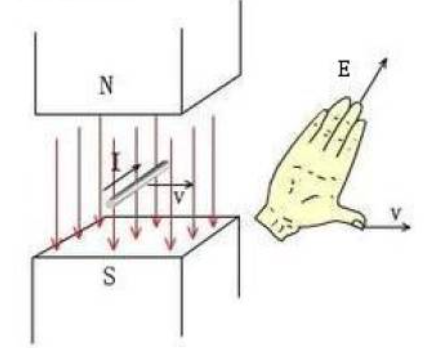
ໃຫ້ເສັ້ນສະຫນາມແມ່ເຫຼັກຜ່ານຝາມື, ທິດທາງຂອງໂປ້ມືແມ່ນທິດທາງຂອງການເຄື່ອນໄຫວ, ແລະທິດທາງຂອງນິ້ວມືແມ່ນທິດທາງຂອງແຮງໄຟຟ້າທີ່ຜະລິດ.ເປັນຫຍັງເວົ້າລົມກ່ຽວກັບແຮງໄຟຟ້າແຮງຈູງໃຈ?ຂ້ອຍບໍ່ຮູ້ວ່າເຈົ້າມີປະສົບການທີ່ຄ້າຍຄືກັນບໍ.ເມື່ອທ່ານປະສົມປະສານສາຍສາມເຟດຂອງມໍເຕີແລະຫັນມໍເຕີດ້ວຍມື, ທ່ານຈະພົບວ່າຄວາມຕ້ານທານແມ່ນໃຫຍ່ຫຼາຍ.ນີ້ແມ່ນຍ້ອນວ່າ induction ເກີດຂຶ້ນໃນລະຫວ່າງການຫມຸນຂອງມໍເຕີ.ແຮງໄຟຟ້າຈະສ້າງກະແສໄຟຟ້າ, ແລະກະແສໄຟຟ້າທີ່ໄຫຼຜ່ານຕົວນໍາໃນສະຫນາມແມ່ເຫຼັກຈະສ້າງຜົນບັງຄັບໃຊ້ກົງກັນຂ້າມກັບທິດທາງຂອງການຫມຸນ, ແລະທຸກຄົນຈະຮູ້ສຶກວ່າມີຄວາມຕ້ານທານຕໍ່ການຫມຸນຫຼາຍ.
ສາຍໄຟສາມເຟດຖືກແຍກອອກແລະມໍເຕີສາມາດຫັນໄດ້ງ່າຍ
ສາຍສາມເຟດຖືກລວມເຂົ້າກັນ, ແລະຄວາມຕ້ານທານຂອງມໍເຕີແມ່ນມີຂະຫນາດໃຫຍ່ຫຼາຍ.ຕາມກົດລະບຽບຂອງສະກູຂວາມື, ຖື solenoid energized ດ້ວຍມືຂວາ, ເພື່ອໃຫ້ນິ້ວມືທັງສີ່ງໍໃນທິດທາງດຽວກັນກັບປະຈຸບັນ, ຫຼັງຈາກນັ້ນປາຍທີ່ຊີ້ດ້ວຍໂປ້ມືແມ່ນ N pole ຂອງ solenoid energized.
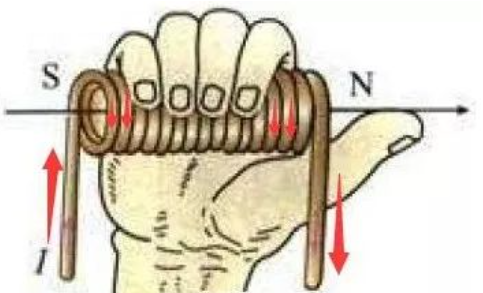
ກົດລະບຽບນີ້ແມ່ນພື້ນຖານສໍາລັບການຕັດສິນ polarity ຂອງ coil energized, ແລະທິດທາງຂອງລູກສອນສີແດງແມ່ນທິດທາງໃນປະຈຸບັນ.ຫຼັງຈາກອ່ານສາມກົດລະບຽບ, ໃຫ້ພວກເຮົາພິຈາລະນາຫຼັກການພື້ນຖານຂອງການຫມຸນມໍເຕີ.ພາກສ່ວນທໍາອິດ: ຮູບແບບມໍເຕີ DC ພວກເຮົາຊອກຫາແບບຈໍາລອງຂອງມໍເຕີ DC ທີ່ໄດ້ສຶກສາຢູ່ໃນໂຮງຮຽນຟີຊິກ, ແລະດໍາເນີນການວິເຄາະແບບງ່າຍໆໂດຍຜ່ານວິທີການວິເຄາະວົງຈອນແມ່ເຫຼັກ.
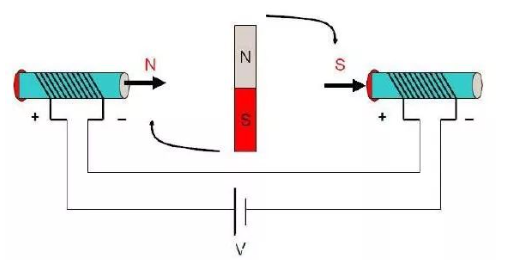
ສະຖານະ 1 ເມື່ອກະແສໄຟຟ້າຖືກນຳໄປໃຊ້ໃສ່ທໍ່ຢູ່ທັງສອງສົ້ນ, ຕາມກົດລະບຽບສະກູຂວາມື, ຄວາມເຂັ້ມຂຸ້ນຂອງແມ່ເຫຼັກທີ່ໃຊ້ B (ດັ່ງທີ່ສະແດງໂດຍລູກສອນໜາ) ຈະຖືກສ້າງຂຶ້ນ, ແລະ rotor ຢູ່ເຄິ່ງກາງຈະພະຍາຍາມສ້າງ. ທິດທາງຂອງສາຍ induction ແມ່ເຫຼັກພາຍໃນຂອງຕົນເທົ່າທີ່ເປັນໄປໄດ້.ທິດທາງຂອງເສັ້ນສະຫນາມແມ່ເຫຼັກພາຍນອກແມ່ນສອດຄ່ອງກັນເພື່ອສ້າງເປັນ loop ສາຍພາກສະຫນາມແມ່ເຫຼັກທີ່ສັ້ນທີ່ສຸດ, ດັ່ງນັ້ນ rotor ພາຍໃນຈະຫມຸນຕາມເຂັມໂມງ.ໃນເວລາທີ່ທິດທາງຂອງສະຫນາມແມ່ເຫຼັກ rotor ແມ່ນ perpendicular ກັບທິດທາງຂອງສະຫນາມແມ່ເຫຼັກພາຍນອກ, ແຮງບິດຫມຸນຂອງ rotor ແມ່ນທີ່ໃຫຍ່ທີ່ສຸດ.ໃຫ້ສັງເກດວ່າ "ປັດຈຸບັນ" ໄດ້ຖືກກ່າວເຖິງວ່າໃຫຍ່ທີ່ສຸດ, ບໍ່ແມ່ນ "ຜົນບັງຄັບໃຊ້".ມັນເປັນຄວາມຈິງທີ່ວ່າໃນເວລາທີ່ສະຫນາມແມ່ເຫຼັກ rotor ຢູ່ໃນທິດທາງດຽວກັນກັບສະຫນາມແມ່ເຫຼັກພາຍນອກ, ຜົນບັງຄັບໃຊ້ແມ່ເຫຼັກຢູ່ rotor ແມ່ນໃຫຍ່ທີ່ສຸດ, ແຕ່ໃນເວລານີ້ rotor ຢູ່ໃນລັດຕາມລວງນອນແລະແຂນແຮງແມ່ນ 0, ແລະຂອງ. ແນ່ນອນ, ມັນຈະບໍ່ຫມຸນ.ເພື່ອເພີ່ມ, ປັດຈຸບັນແມ່ນຜະລິດຕະພັນຂອງກໍາລັງແລະແຂນແຮງ.ຖ້າຫນຶ່ງໃນນັ້ນແມ່ນສູນ, ຜະລິດຕະພັນແມ່ນສູນ.ເມື່ອ rotor ຫັນໄປຫາຕໍາແຫນ່ງແນວນອນ, ເຖິງແມ່ນວ່າມັນບໍ່ໄດ້ຮັບຜົນກະທົບຈາກແຮງບິດຫມຸນ, ມັນຈະສືບຕໍ່ຫມຸນຕາມເຂັມໂມງເນື່ອງຈາກ inertia.ໃນເວລານີ້, ຖ້າທິດທາງປະຈຸບັນຂອງສອງ solenoids ມີການປ່ຽນແປງ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້, rotor ຈະສືບຕໍ່ຫມຸນ.ຫັນໜ້າຕາມເຂັມໂມງ,
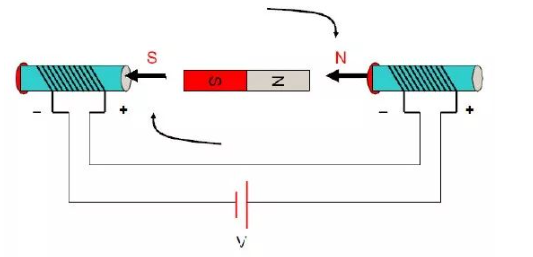
ໃນລັດ 2, ທິດທາງໃນປະຈຸບັນຂອງທັງສອງ solenoids ມີການປ່ຽນແປງຢ່າງຕໍ່ເນື່ອງ, ແລະ rotor ພາຍໃນຈະສືບຕໍ່ຫມຸນ.ການປະຕິບັດການປ່ຽນແປງທິດທາງຂອງປະຈຸບັນນີ້ເອີ້ນວ່າ commutation.A ຫມາຍເຫດຂ້າງຄຽງ: ໃນເວລາທີ່ຈະ commutate ພຽງແຕ່ກ່ຽວຂ້ອງກັບຕໍາແຫນ່ງຂອງ rotor ແລະບໍ່ກ່ຽວຂ້ອງໂດຍກົງກັບປະລິມານອື່ນໆ.ສ່ວນທີ 2: ມໍເຕີ rotor ພາຍໃນສາມເຟດສາມເຟດ ໂດຍທົ່ວໄປແລ້ວ, windings ສາມເຟດຂອງ stator ມີໂຫມດການເຊື່ອມຕໍ່ດາວແລະຮູບແບບການເຊື່ອມຕໍ່ delta, ແລະ "ໂຫມດການນໍາສອງຂອງການເຊື່ອມຕໍ່ດາວສາມເຟດ" ແມ່ນທົ່ວໄປທີ່ສຸດ. ຖືກນໍາໃຊ້, ເຊິ່ງຖືກນໍາໃຊ້ຢູ່ທີ່ນີ້.ຮູບແບບນີ້ແມ່ນໃຊ້ສໍາລັບການວິເຄາະງ່າຍດາຍ.
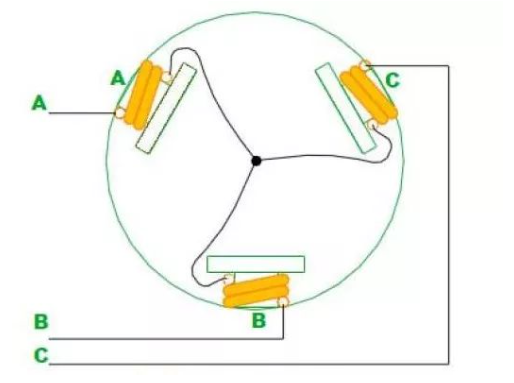
ຮູບຂ້າງເທິງສະແດງໃຫ້ເຫັນວິທີການເຊື່ອມຕໍ່ windings stator (rotor ບໍ່ໄດ້ສະແດງໃຫ້ເຫັນເປັນແມ່ເຫຼັກສອງຂົ້ວສົມມຸດຕິຖານ), ແລະສາມ windings ແມ່ນເຊື່ອມຕໍ່ກັນເປັນຮູບ "Y" ຜ່ານຈຸດເຊື່ອມຕໍ່ສູນກາງ.ມໍເຕີທັງຫມົດນໍາໄປສູ່ສາມສາຍ A, B, C. ໃນເວລາທີ່ພວກເຂົາຖືກ energized ສອງໂດຍສອງ, ມີ 6 ກໍລະນີ, ຄື AB, AC, BC, BA, CA, CB.ໃຫ້ສັງເກດວ່ານີ້ແມ່ນຢູ່ໃນຄໍາສັ່ງ.
ໃນປັດຈຸບັນຂ້າພະເຈົ້າເບິ່ງຢູ່ໃນຂັ້ນຕອນທໍາອິດ: ໄລຍະ AB ແມ່ນ energized
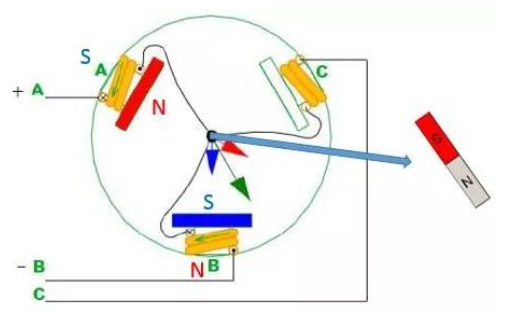
ເມື່ອໄລຍະ AB ຖືກພະລັງງານ, ທິດທາງຂອງເສັ້ນສະຫນາມແມ່ເຫຼັກທີ່ຜະລິດໂດຍທໍ່ຂົ້ວ A ແມ່ນສະແດງໂດຍລູກສອນສີແດງ, ແລະທິດທາງຂອງເສັ້ນພາກສະຫນາມແມ່ເຫຼັກທີ່ສ້າງໂດຍເສົາ B ແມ່ນສະແດງໂດຍລູກສອນສີຟ້າ, ຫຼັງຈາກນັ້ນທິດທາງ. ຂອງຜົນບັງຄັບໃຊ້ແມ່ນສະແດງໂດຍລູກສອນສີຂຽວ, ຫຼັງຈາກນັ້ນສົມມຸດວ່າມີແມ່ເຫຼັກສອງເສົາ, ທິດທາງ N-pole ຈະກົງກັນກັບທິດທາງທີ່ສະແດງໂດຍລູກສອນສີຂຽວຕາມ "rotor ຢູ່ກາງຈະພະຍາຍາມຮັກສາ. ທິດທາງຂອງສາຍສະຫນາມແມ່ເຫຼັກພາຍໃນຂອງຕົນສອດຄ່ອງກັບທິດທາງຂອງສາຍສະຫນາມແມ່ເຫຼັກພາຍນອກ."ສໍາລັບ C, ລາວບໍ່ມີຫຍັງກ່ຽວຂ້ອງກັບລາວໃນເວລານີ້.
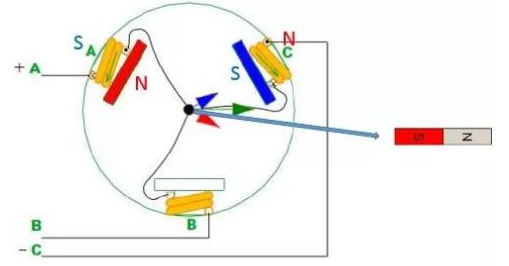
ໄລຍະ 2: ໄລຍະ AC Energized
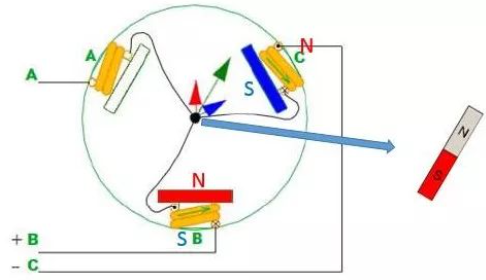
ໄລຍະທີສາມ: ໄຟຟ້າໄລຍະ BC
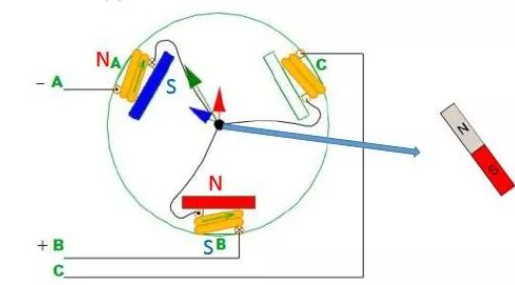
ໄລຍະທີສາມ: ໄລຍະ BA ແມ່ນພະລັງງານ
ຕໍ່ໄປນີ້ແມ່ນແຜນວາດສະຖານະຂອງແມ່ເຫຼັກກາງ (rotor): ແຕ່ລະຂະບວນການ rotor 60 ອົງສາ.

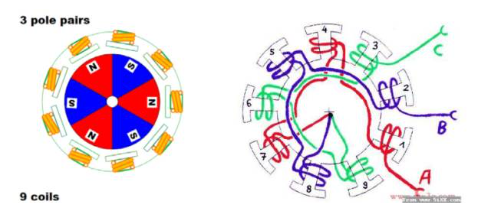
ການໝູນວຽນຄົບຖ້ວນແມ່ນສຳເລັດໃນຫົກຂະບວນການ, ໃນນັ້ນມີການຜັນແປ 6 ຄັ້ງ.ສ່ວນທີສາມ: ມໍເຕີ rotor ພາຍໃນສາມເຟດ multi-winding ຫຼາຍເສົາ, ໃຫ້ເບິ່ງຈຸດທີ່ສັບສົນຫຼາຍ.ຮູບ (ກ) ເປັນມໍເຕີສາມເຟດ ເກົ້າສາຍ ຫົກເສົາ (ສາມເຟດ, ເກົ້າລົມ, ຫົກເສົາ).ກົງກັນຂ້າມ pole) motor rotor ພາຍໃນ, ການເຊື່ອມຕໍ່ winding ຂອງຕົນແມ່ນສະແດງໃຫ້ເຫັນໃນຮູບ (b).ມັນສາມາດເຫັນໄດ້ຈາກຮູບ (b) ວ່າ windings ສາມໄລຍະຍັງເຊື່ອມຕໍ່ກັນຢູ່ຈຸດກາງ, ເຊິ່ງເປັນການເຊື່ອມຕໍ່ດາວເຊັ່ນກັນ.ໂດຍທົ່ວໄປແລ້ວ, ຈໍານວນຂອງ windings ຂອງມໍເຕີແມ່ນບໍ່ສອດຄ່ອງກັບຈໍານວນຂອງເສົາແມ່ເຫຼັກຖາວອນ (ຕົວຢ່າງເຊັ່ນ, 9 windings ແລະ 6 poles ຖືກນໍາໃຊ້ແທນທີ່ຈະເປັນ 6 windings ແລະ 6 poles), ເພື່ອປ້ອງກັນແຂ້ວຂອງ stator ແລະ. ແມ່ເຫຼັກຂອງ rotor ຈາກການດຶງດູດແລະສອດຄ່ອງ.
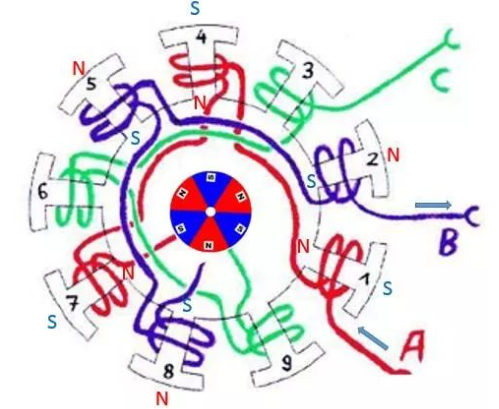
ຫຼັກການຂອງການເຄື່ອນໄຫວຂອງມັນແມ່ນ: N pole ຂອງ rotor ແລະເສົາ S ຂອງ winding energized ມີແນວໂນ້ມທີ່ຈະສອດຄ່ອງ, ແລະເສົາ S ຂອງ rotor ແລະ N pole ຂອງ winding energized ມີແນວໂນ້ມທີ່ຈະສອດຄ່ອງ.ນັ້ນແມ່ນ, S ແລະ N ດຶງດູດເຊິ່ງກັນແລະກັນ.ໃຫ້ສັງເກດວ່າມັນແຕກຕ່າງຈາກວິທີການວິເຄາະທີ່ຜ່ານມາ.ດີ, ໃຫ້ເຮົາຊ່ວຍທ່ານວິເຄາະມັນອີກເທື່ອຫນຶ່ງ.ໄລຍະທໍາອິດ: ໄລຍະ AB ແມ່ນໄຟຟ້າ
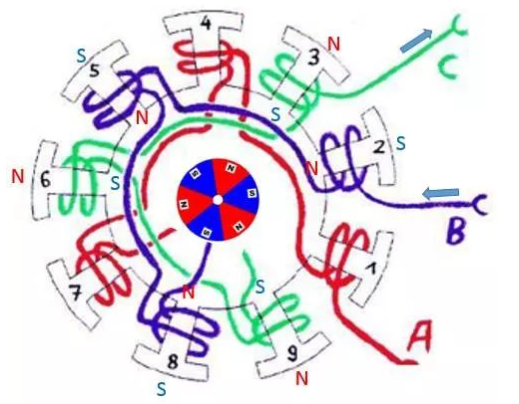
ໄລຍະ 2: ໄລຍະ AC Energized

ໄລຍະທີສາມ: ໄຟຟ້າໄລຍະ BC
ເວລາປະກາດ: ຕຸລາ 21-2022